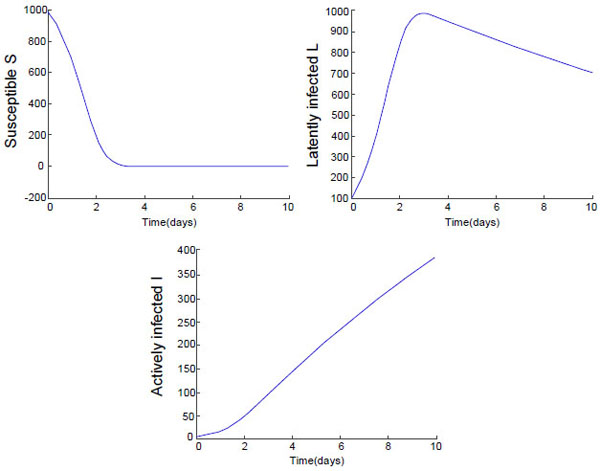
Fig. (2)
There is no control (u = 0), the paths
S (t), L (t), I (t)
and the optimal control
u (t)
for 10 days.