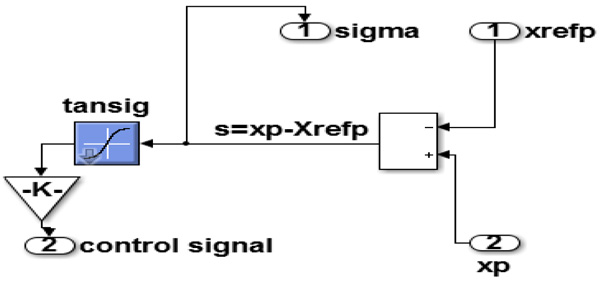
Fig. (5)
Simulation of sliding mode controller.