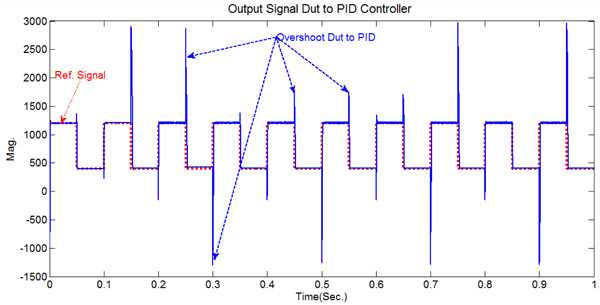
Fig. (8)
x
pref
(t) and x
p
(t) with uncertainty and delay using PID controller.