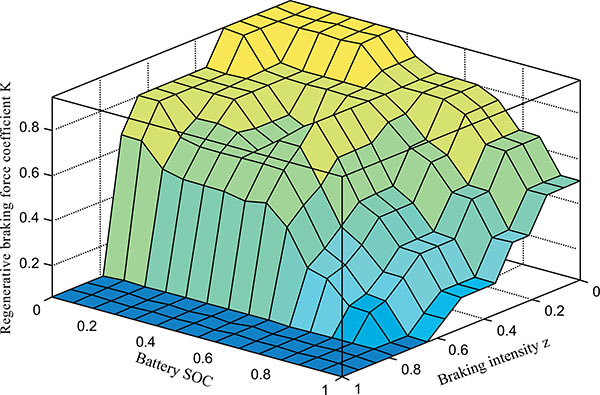
Fig. (9)
Braking force distribution of the fuzzy controller’s reasoning surface.