- Home
- About Journals
-
Information for Authors/ReviewersEditorial Policies
Publication Fee
Publication Cycle - Process Flowchart
Online Manuscript Submission and Tracking System
Publishing Ethics and Rectitude
Authorship
Author Benefits
Reviewer Guidelines
Guest Editor Guidelines
Peer Review Workflow
Quick Track Option
Copyediting Services
Bentham Open Membership
Bentham Open Advisory Board
Archiving Policies
Fabricating and Stating False Information
Post Publication Discussions and Corrections
Editorial Management
Advertise With Us
Funding Agencies
Rate List
Kudos
General FAQs
Special Fee Waivers and Discounts
- Contact
- Help
- About Us
- Search




The Open Electrical & Electronic Engineering Journal
(Discontinued)
ISSN: 1874-1290 ― Volume 13, 2019
Hierarchical Reinforcement Learning Based Self-balancing Algorithm for Two-wheeled Robots
Juan Yan*, Huibin Yang
Abstract
Self-balancing control is the basis for applications of two-wheeled robots. In order to improve the self-balancing of two-wheeled robots, we propose a hierarchical reinforcement learning algorithm for controlling the balance of two-wheeled robots. After describing the subgoals of hierarchical reinforcement learning, we extract features for subgoals, define a feature value vector and its corresponding weight vector, and propose a reward function with additional subgoal reward function. Finally, we give a hierarchical reinforcement learning algorithm for finding the optimal strategy. Simulation experiments show that, the proposed algorithm is more effectiveness than traditional reinforcement learning algorithm in convergent speed. So in our system, the robots can get self-balanced very quickly.
Article Information

Identifiers and Pagination:
Year: 2016Volume: 10
First Page: 69
Last Page: 79
Publisher Id: TOEEJ-10-69
DOI: 10.2174/1874129001610010069
Article History:
Received Date: 15/02/2016Revision Received Date: 10/05/2016
Acceptance Date: 15/05/2016
Electronic publication date: 29/07/2016
Collection year: 2016
open-access license: This is an open access article licensed under the terms of the Creative Commons Attribution-Non-Commercial 4.0 International Public License (CC BY-NC 4.0) (https://creativecommons.org/licenses/by-nc/4.0/legalcode), which permits unrestricted, non-commercial use, distribution and reproduction in any medium, provided the work is properly cited.
* Address correspondence to this author at the College of Mechanical Engineering, Shanghai University of Engineering Science, Shanghai, China; E-mail: yanjuanxz@sina.com
| Open Peer Review Details | |||
|---|---|---|---|
| Manuscript submitted on 15-02-2016 |
Original Manuscript | Hierarchical Reinforcement Learning Based Self-balancing Algorithm for Two-wheeled Robots | |
1. INTRODUCTION
The two-wheeled self-balancing robot [1C-C. Tsai, H-C. Huang, and S-C. Lin, "Adaptive neural network control of a self-balancing two-wheeled scooter", Ind. Electron. IEEE Trans., vol. 57, no. 4, pp. 1420-1428, 2010.] is an important research topic in intelligent developmental robots. Comparing with traditional robots, the intelligence of this kind of robots can develop dynamically with external environments, and the intelligence comes from an inner system similar to human brain [2C-N. Huang, "The development of self-balancing controller for one-wheeled vehicles", Engineering, vol. 2, no. 04, p. 212, 2010.
[http://dx.doi.org/10.4236/eng.2010.24031] ]. The self-balancing of two-wheeled self-balancing robot is controlled by its inner development mechanism, and is reinforced by the intelligence according to communications with external environment by sensors and executors [3Q. Yong, L. Yanlong, and Z. Xizhe, "Balance control of two-wheeled self-balancing mobile robot based on ts fuzzy model", In: 6th Int. Forum Strategic Technol. (IFOST)-IEEE, vol. 1. 2011, pp. 406-409.].
Aiming at the self-balancing of two-wheeled robot, researches have proposed a lot of control approaches. Wu et al. [4J. Wu, Y. Liang, and Z. Wang, "A robust control method of two-wheeled self-balancing robot", In: 6th Int. Forum Strategic Technol. (IFOST)-IEEE, vol. 2. 2011, pp. 1031-1035.] implement the control of an inverted Pendulum according to Q-learning [5C.J. Watkins, and P. Dayan, "Q-learning", Mach. Learn., vol. 8, no. 3-4, pp. 279-292, 1992.
[http://dx.doi.org/10.1007/BF00992698] ] and back propagation neural networks [6A. Goh, "Back-propagation neural networks for modeling complex systems", Artif. Intell. Eng., vol. 9, no. 3, pp. 143-151, 1995.
[http://dx.doi.org/10.1016/0954-1810(94)00011-S] ]; Jeong and Takahashi [7S. Jeong, and T. Takahashi, "Wheeled inverted pendulum type assistant robot: inverted mobile, standing, and sitting motions", In: International Conference on IEEE/RSJ, IEEE, 2007, pp. 1932-1937.] design a balancing controller based on the problem of two-level inverted pendulum, and they apply the linear quadratic regulator algorithm; Miasa et al. [8S. Miasa, M. Al-Mjali, A.A Ibrahim, and T. Tutunji, "Fuzzy control of a two-wheel balancing robot using dspic", In: 7th International Multi-Conference on Systems Signals and Devices (SSD), IEEE: Amman, 2010, pp. 1-6.
[http://dx.doi.org/10.1109/SSD.2010.5585525] ] apply a hierarchical fuzzy control model to acquire the self-balancing. The above algorithms for self-balancing in two-wheeled robots are all based on neural networks, and they have the advantage of high fault-tolerance. However, their disadvantages are weak learning ability and also sensitive to external noise, so the controller is hard to reach a stable status.
Reinforcement learning is a unsupervised learning approach, and is widely used in real time controlling [9S. Adam, L. Bu¸soniu, and R. Babuˇska, "Experience replay for real-time reinforcement learning control", Syst. Man Cybern., Part C: Appl. Rev., IEEE Trans., vol. 42, no. 2, pp. 201-212, 2012.]. In reinforcement learning, the controller communicates with external environment according to trial-and-error. Hierarchical reinforcement learning [10M.M. Botvinick, "Hierarchical reinforcement learning and decision making", Curr. Opin. Neurobiol., vol. 22, no. 6, pp. 956-962, 2012.
[http://dx.doi.org/10.1016/j.conb.2012.05.008] [PMID: 22695048] ] is one of the most important researches in reinforcement learning, and it can solve the problem of dimensionality curse in status and action spaces. Classical hierarchical reinforcement learning approaches include Option [11R.S. Sutton, D. Precup, and S. Singh, "Between mdps and semi-mdps: A framework for temporal abstraction in reinforcement learning", Artif. Intell., vol. 112, no. 1, pp. 181-211, 1999.
[http://dx.doi.org/10.1016/S0004-3702(99)00052-1] ], MAXQ [12T.G. Dietterich, "Hierarchical reinforcement learning with the maxq value function decomposition", J. Artif. Intell. Res., vol. 13, pp. 227-303, 2000. [JAIR].], HAM [13R.E. Parr, Hierarchical Control and Learning for Markov Decision Processes., University of California: Berkeley, 1998.].
In this paper, we study how the two-wheeled robots can get self-balanced very quickly. Based on traditional reinforcement learning algorithm, we propose a hierarchical reinforcement learning algorithm. In our hierarchical reinforcement learning algorithm, in order to speed up the convergence, we add a heuristic reward function in each subgoals.
The rest of the paper is organized as follows. In section 2, we review related works about reinforcement learning especially on hierarchical reinforcement learning. In section 3, we describe our proposed hierarchical reinforcement learning approach. Experiments and conclusion are given in section 4 and 5 respectively.
2. RELATED WORKS
In this section, we describe the definition of reinforcement learning, and review related works on reinforcement learning, especially on hierarchical reinforcement learning.
Reinforcement learning is a unsupervised learning, and it is based on the idea that, if some action of an agent can get positive reward from environment, then the trend of this action will be reinforced in the future. The basic model of reinforcement learning can be described in Fig. (1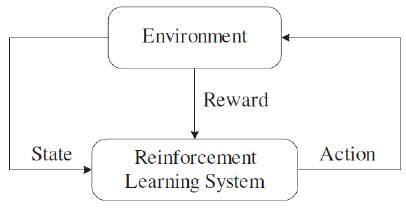 ).
).
 |
Fig. (1) Model of reinforcement learning. |
The process of reinforcement learning can be described as a Markov decision process, and the Markov decision process can be defined by a quadri-tuple < S,A,R,P >, where S is the set of statuses, A is the set of actions,R : S × A → R is the reward function, and R : S × A → S is the status transition function. In Markov decision process, the reward and next status only depend on the current status and the selected action, and the objective of an agent is to find the optimal action strategy and maximize the expected discount reward.
In order to find optimal action strategy, researchers introduce the concept of quality function. Currently, the commonly used quality function is the Q function, i.e. Q-learning. In Q-learning [5C.J. Watkins, and P. Dayan, "Q-learning", Mach. Learn., vol. 8, no. 3-4, pp. 279-292, 1992.
[http://dx.doi.org/10.1007/BF00992698] ], the reward is based on status-action pair, and the update rule is
 |
(1) |
where C is the learning rate, γ is the discount factor, r is the current reward, and s' is the next status.
Traditional reinforcement learning approaches only improve their strategies via experienced rewards, and need very long time to train, so the convergence speed is very slow. In order to speed up the convergence, Singer and Veloso [14B. Singer, and M. Veloso, Learning State Features from Policies to Bias Exploration in Reinforcement Learning. CMU-CS-99-122., School of Computer Science Carnegie Mellon University: Pittsburgh, 1999.] propose to solve the new problem via inducing the local features of original problem; Hailu and Sommer [15G. Hailu, and G. Sommer, "On amount and quality of bias in reinforcement learning", In: Syst. Man Cybern., IEEE SMC '99 Conf. Proc. 1999 IEEE Int. Conf., vol. 2. 1999, pp. 728-733.
[http://dx.doi.org/10.1109/ICSMC.1999.825352] ] discuss the effects of different bias information on learning speed by introducing environment information. Moreno et al. [16D.L. Moreno, C.V. Regueiro, R. Iglesias, and S. Barro, Using Prior Knowledge to Improve Reinforcement Learning in Mobile Robotics. Proceedings Towards Autonomous Robotics Systems, University of Essex: UK, 2004, pp. 1744-8050.] propose to to introduce prior in supervised reinforcement learning; Lin and Li [17Y-P. Lin, and X-Y. Li, "Reinforcement learning based on local state feature learning and policy adjustment", Inf. Sci., vol. 154, no. 1, pp. 59-70, 2003.
[http://dx.doi.org/10.1016/S0020-0255(03)00006-9] ] build a reinforcement learning model based on latent bias; and Fernández and Veloso [18F. Fern’andez, and M. Veloso, "Probabilistic policy reuse in a reinforcement learning agent", In: Proceedings of the 5th International Joint Conference on Autonomous Agents and Multiagent Systems, ACM, 2006, pp. 720-727.
[http://dx.doi.org/10.1145/1160633.1160762] ] reuse past learnt bias to supervise the solving of similar tasks. The above approaches use bias to supervise the selection of strategies from actions, can utilize the bias from external environment or past tasks, and thus the learning speed is accelerated. However, whenever the bias is unsuitable, it can mislead the agent, and then the learning would be not convergent.
Hierarchical reinforcement learning, e.g. Option [11R.S. Sutton, D. Precup, and S. Singh, "Between mdps and semi-mdps: A framework for temporal abstraction in reinforcement learning", Artif. Intell., vol. 112, no. 1, pp. 181-211, 1999.
[http://dx.doi.org/10.1016/S0004-3702(99)00052-1] ], MAXQ [12T.G. Dietterich, "Hierarchical reinforcement learning with the maxq value function decomposition", J. Artif. Intell. Res., vol. 13, pp. 227-303, 2000. [JAIR].], HAM [13R.E. Parr, Hierarchical Control and Learning for Markov Decision Processes., University of California: Berkeley, 1998.], can speed up the convergence of learning efficiently, and is widely used in many fields. Many extended approaches are based on Option, MAXQ and HAM. Mehta et al. [19N. Mehta, S. Natarajan, P. Tadepalli, and A. Fern, "Transfer in variable-reward hierarchical reinforcement learning", Mach. Learn., vol. 73, no. 3, pp. 289-312, 2008.
[http://dx.doi.org/10.1007/s10994-008-5061-y] ] propose to denote the reward function as vector of status features, and use the learnt experience to reward functions (vectors) of the same hierarchies; Schultink et al. [20E.G. Schultink, R. Cavallo, and D.C. Parkes, Economic Hierarchical q-Learning., AAAI, 2008, pp. 689-695.] propose an economic hierarchical q-Learning algorithm, which can converge to hierarchical optimums theoretically. Moreover, in finding subgoals in hierarchical reinforcement learning, Stolle and Precup [21M. Stolle, and D. Precup, "Learning options in reinforcement learning", In: SARA, Springer, 2002, pp. 212-223.
[http://dx.doi.org/10.1007/3-540-45622-8_16] ] assume the frequently accessed points be subgoals; Mannor et al. [22S. Mannor, I. Menache, A. Hoze, and U. Klein, "Dynamic abstraction in reinforcement learning via clustering", In: Proceedings of the Twenty-first International Conference on Machine Learning, ACM, 2004, pp. 71-80.
[http://dx.doi.org/10.1145/1015330.1015355] ] argue that subgoals should be the points accessed frequently by valid pathes; Şimşek et al. [23O. Simsek, A.P. Wolfe, and A.G. Barto, "Identifying useful subgoals in reinforcement learning by local graph partitioning", In: Proceedings of the 22nd International Conference on Machine Learning, ACM, 2005, pp. 816-823.] find subgoals using recent status transition graph according to graph partition; and Wixson [24L. Wixson, "Scaling reinforcement learning techniques via modularity", In: Proceedings of the 8th International Workshop on Machine Learning, 2014, pp. 368-372.] applies modularity to find subgoals such that the algorithm can be scaled to large scale reinforcement learning.
3. HIERARCHICAL REINFORCEMENT LEARNING
In this paper, we propose a hierarchical reinforcement learning algorithm based on heuristic reward function. With this approach, the two-wheeled robot can learn from environment, and thus keep self-balancing as far as possible.
3.1. Description of Subgoals
Description of subgoals is the hardest part in hierarchical reinforcement learning. In this paper, we describe each subgoal with an uncertain limited status controller, which is proposed by Dietterich [12T.G. Dietterich, "Hierarchical reinforcement learning with the maxq value function decomposition", J. Artif. Intell. Res., vol. 13, pp. 227-303, 2000. [JAIR].].
Given an objective or goal M, we partition M into a subgoal set {M0, M1,...,Mn}, and each Mi(0 ≤ i ≤ n) is denoted as a triple < Ti, Ai, Ri >, where Ti is the status set in subgoal Mi, Ai is the executable action set in Mi, and Ri is its corresponding reward function in Mi. In this paper, we aim to extend the reward function Ri of subgoal Mi, and then accelerate the convergence speed. After extending reward function Ri of Mi to Ri', we get a new triple < Ti, Ai, Ri' >. While Learning all subgoals, the strategy π is partitioned into {π0, π1,...,πn}, where πi is the strategy of subgoal Mi, and all πis are independent with each other. Then, all optimal strategy of subgoals will make up the final optimal strategy of the goal M, i.e. π* = {π*0, π*1,...,π*n}.
3.2. Subgoal Feature Extraction and Reward Function
In order to utilize heuristic reward function, we extract features from subgoals. We use the extracted features to evaluate the current status, and then design corresponding reward function F. For each subgoal Mi in M, we give the following definitions.
Definition 1. Mi is the i-th subgoal of M, then the feature vector Ti of subgoal Mi is
 |
(2) |
where k is the number of features, and tij (1 ≤ j ≤ k) is the j-th status feature.
Ti is a vector description of status features. For example, extracting features from a polygon can get a feature vector
Ti is an abstraction of status features, and it can’t be used in the learning system directly. In order to apply status features, we need to quantify each element in the feature vector.
Definition 2. Feature vector Ti can be quantified to be a feature value vector Ni, which is
 |
(3) |
where nij is the feature value corresponding to feature tij in subgoal Mi.
In a reinforcement learning system, each feature belongs to a certain value scope, and this value scope is determined by concreting applications. In addition, each feature has different effectiveness on learning process, so each feature must have its own weight.
Definition 3. The weight vector Wi of the feature value vector Ni is
 |
(4) |
where wij is the weight of the j-th feature value nij.
In Wi, the value of its element wij can be positive, zero or even negative. When wij > 0, this feature is encouraged in learning, when wij = 0, this feature can be ignored, and when wij < 0, this feature should be penalized. Based on the above three definitions, we define an additional function for the heuristic reward function.
Definition 4. The additional function Fi for the heuristic reward function is
 |
(5) |
where WiT is the transpose of Wi.
In equation 5, the value of Fi can also be positive, zero or even negative. When Fi > 0, the environment gives some reward to the heuristic function, and when Fi < 0, the environment punishes the heuristic function. Finally, the reward function for a generalized Markov Decision Process is defined as follows.
Definition 5. The reward function for a generalized Markov Decision Process is
 |
(6) |
where Ri is the reward function in a standard reinforcement learning.
In order to make the learning algorithm converge, Ri must be bounded. In addition, because the elements in Wi and Ni are constants and the number of status features is limited, i.e. k < ∞, Fi is also bounded. So, Fi' is also a bounded reward function, which is the basis for an learning algorithm to converge.
3.2.1. Optimal Strategy
The goal of reinforcement learning is to find an optimal strategy, and this can be done by continuous iterations. Let V πi (i, s) be the value of status s in strategy πi in subgoal Mi, then the Bellman equation is
 |
(7) |
By continuous iterations, we can get the optimal function of the i-th subgoal under the optimal strategy π*. That is
 |
(8) |
where P ass' and (Ri') ass' are the transition probability and heuristic reward value from status s to status s' while executing action a, and γ is the discount factor.
In equation 8, we present the optimal Bellman equation with status-value function In order to implement an online control algorithm, the Bellman equation is usually represented with an action-value function. In subgoal Mi, the current status is s, if we act with action a according to strategy πi, then the acquired Q value is
 |
(9) |
where λ is the parameter of step number, γ is the discount factor. Then, the corresponding action-value function Bellman equation is
 |
(10) |
In order to assure the algorithm be convergent, it only needs to select the actions greedily. So during the execution of algorithm, we use the follow equation to update the Q value.
 |
(11) |
3.3. Hierarchical Reinforcement Learning Algorithm
Partition [Trial mode] into [Trial mode], such that for each [Trial mode] ([Trial mode]), [Trial mode][Trial mode][Trial mode][Trial mode]M[Trial mode] in [Trial mode] [Trial mode] is finished extract features and get [Trial mode] and [Trial mode][Trial mode]W[Trial mode][Trial mode]s[Trial mode][Trial mode] s [Trial mode] select an action [Trial mode] for [Trial mode] from strategy of [Trial mode][Trial mode]a[Trial mode]r[Trial mode]s’[Trial mode]R’ = r+F’[Trial mode]Q(i,s,a)[Trial mode][Trial mode]s[Trial mode] and [Trial mode][Trial mode]
Based on the above subsections, we propose a hierarchical reinforcement learning in algorithm 1. The algorithm first partitions the goal into subgoals, and then learns strategies for each subgoals. Each subgoal iterates the Q value according to the Q-learning algorithm. When all subgoals converge to the optimal values, the goal is convergent to the optimal value too. The proposed reward function can learn from environment heuristically, and accelerates the exploration of unknown environment, so the convergence is speeded up.
4. EXPERIMENTS
The control system in two wheeled self-balancing robots is unstable. If the two wheeled self-balancing robots want to do other behaviours, they must keep themselves self-balanced, so self-balancing is the basis of the action controller. In order to validate the effectiveness of the proposed algorithm, we do some simulation analysis for controlling the self-balancing of two-wheeled robots.
During the reinforcement learning process, the input statuses are the displacement, dip angle and the angular velocities of both wheels, and the output is the control variable. During the evaluation process, the inputs are the displacement, dip angle, the angular velocities of both wheels, and the control variable. In every experiment, when the trail number is larger than 1000 or the step number needed by self-balancing is larger than 20000, we stop the learning process and restart the experiment. After each fail trail, we randomly initialize the statuses and weights in the system, and restart the learning process.
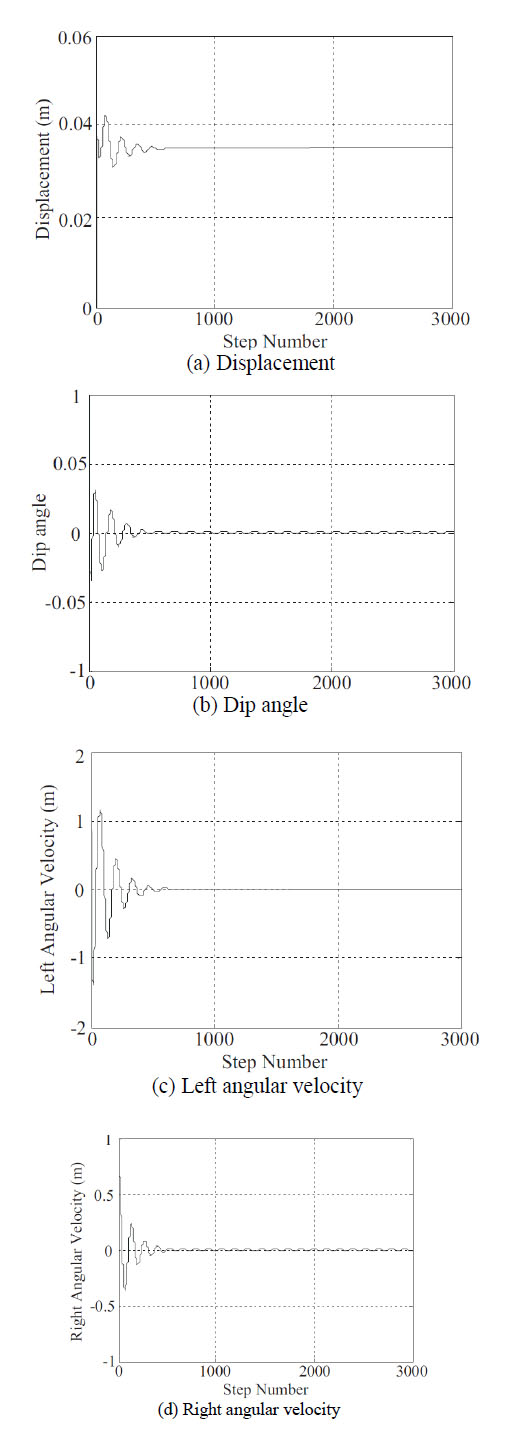
In the simulation experiments, we observe the displacement, dip angle and the angular velocities of both wheels, and the convergence of these status features are in Fig. (2 ). In addition, we also observe the evaluation function and the error along with the step number, and these results are in Figs. (3
). In addition, we also observe the evaluation function and the error along with the step number, and these results are in Figs. (3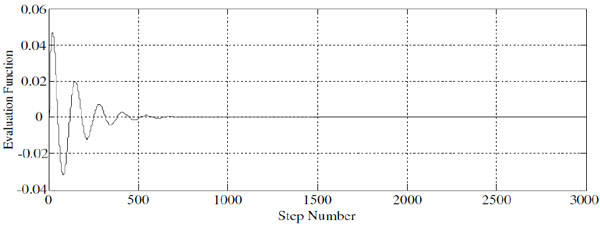 and 4
and 4 ) respectively. From these simulation results we can see that, under an unknown environment without any disturbance, the controller needs about 350 steps to be stable, and the convergence speed is very fast.
) respectively. From these simulation results we can see that, under an unknown environment without any disturbance, the controller needs about 350 steps to be stable, and the convergence speed is very fast.
 |
Fig. (3) Simulation result of evaluation function. |
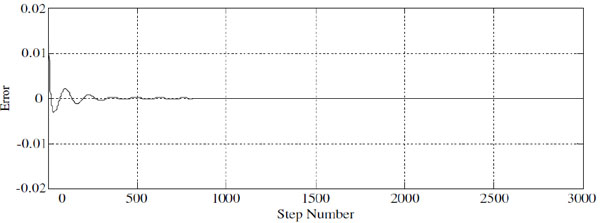 |
Fig. (4) Simulation result of error. |
We compare the evaluation function between our proposed hierarchical reinforcement learning (HRLearning) with the traditional reinforcement learning (RLearning) algorithm, and the result is in Fig. (5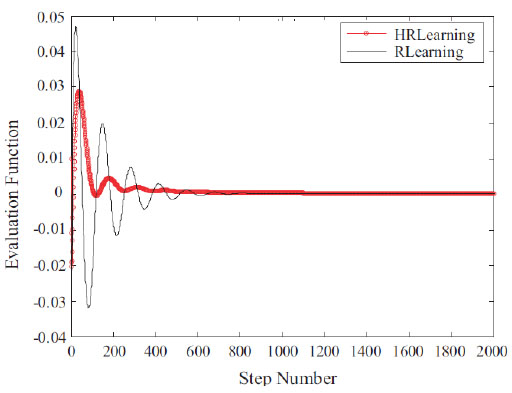 ). As can be seen from the figure that, our proposed HRLearning converges much faster than RLearning, and is also much more robust than RLearning.
). As can be seen from the figure that, our proposed HRLearning converges much faster than RLearning, and is also much more robust than RLearning.
 |
Fig. (5) Comparison of evaluation functions. |
We compare the learning curves of the two algorithms, and the results are in Fig. (6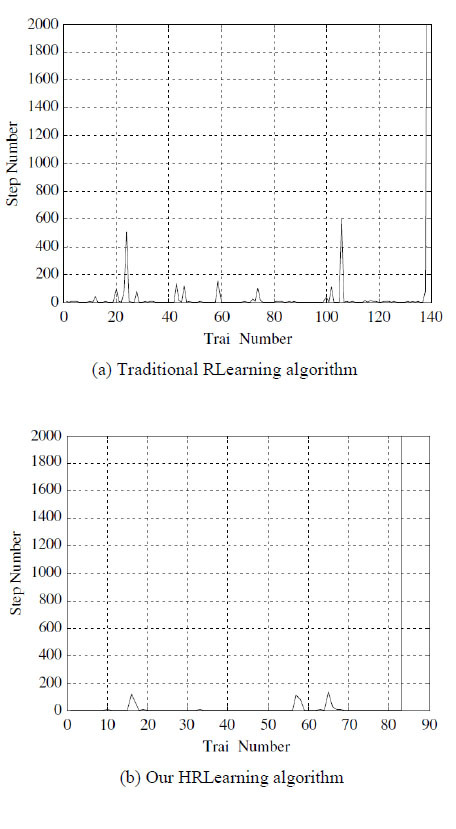 ). Comparing Fig. (6a) and Fig. (6b) we can see that, RLearning implements self-balanced after 108 failure trails, and our proposed HRLearning algorithm only needs 84 failure trails. So, our algorithm has quicker learning speed and better dynamics than traditional reinforcement learning, and thus has better abilities of self-learning and self-balancing.
). Comparing Fig. (6a) and Fig. (6b) we can see that, RLearning implements self-balanced after 108 failure trails, and our proposed HRLearning algorithm only needs 84 failure trails. So, our algorithm has quicker learning speed and better dynamics than traditional reinforcement learning, and thus has better abilities of self-learning and self-balancing.

Finally, we compare the angular velocities of both wheels, and the results are in Fig. (7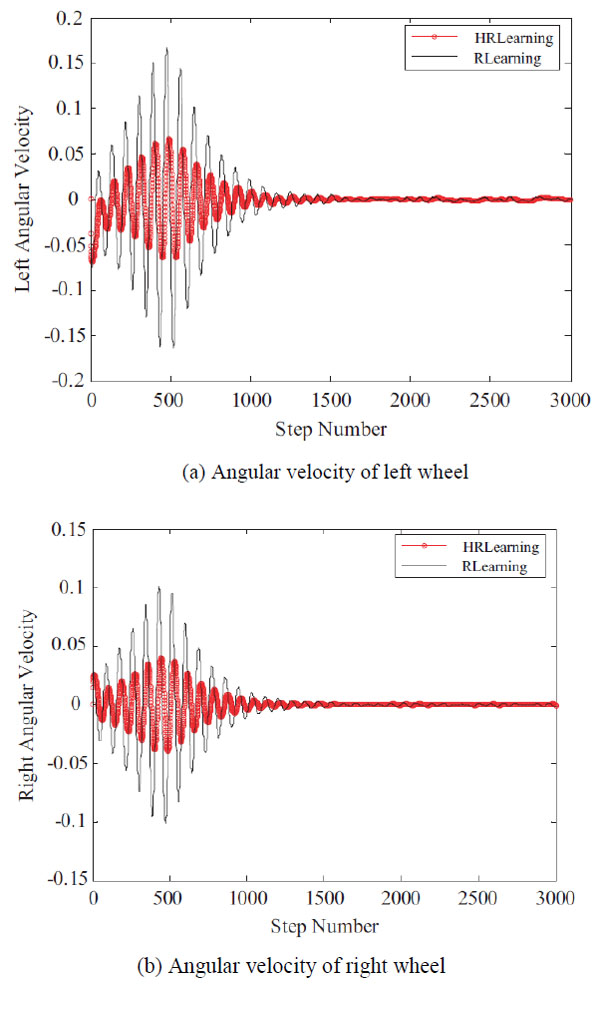 ). From the figure we can see that, our proposed algorithm has less angular velocities than the traditional reinforcement learning algorithm. This illustrates that, in order to keep self-balanced, the wheels in our system moves gently, and rough moves in RLearning will lead the wheels much more imbalanced.
). From the figure we can see that, our proposed algorithm has less angular velocities than the traditional reinforcement learning algorithm. This illustrates that, in order to keep self-balanced, the wheels in our system moves gently, and rough moves in RLearning will lead the wheels much more imbalanced.

CONCLUSION
In this paper, we study the problem of self-balancing in two-wheeled robots, and propose a hierarchical reinforcement learning algorithm. In order to speed up the convergence of learning algorithm, we add a heuristic reward function in each subgoals. After describing the subgoals of hierarchical reinforcement learning, we extract features for subgoals, define a feature value vector and its corresponding weight vector, and propose a reward function with additional subgoal reward function. Simulation experiments show that, the proposed algorithm is more effectiveness than traditional reinforcement learning algorithm in convergent speed. So in our system, the robots can get self-balanced very quickly.
CONFLICT OF INTEREST
The authors confirm that this article content has no conflicts of interest.
ACKNOWLEDGEMENTS
Declared none.
REFERENCES
| [1] | C-C. Tsai, H-C. Huang, and S-C. Lin, "Adaptive neural network control of a self-balancing two-wheeled scooter", Ind. Electron. IEEE Trans., vol. 57, no. 4, pp. 1420-1428, 2010. |
| [2] | C-N. Huang, "The development of self-balancing controller for one-wheeled vehicles", Engineering, vol. 2, no. 04, p. 212, 2010. [http://dx.doi.org/10.4236/eng.2010.24031] |
| [3] | Q. Yong, L. Yanlong, and Z. Xizhe, "Balance control of two-wheeled self-balancing mobile robot based on ts fuzzy model", In: 6th Int. Forum Strategic Technol. (IFOST)-IEEE, vol. 1. 2011, pp. 406-409. |
| [4] | J. Wu, Y. Liang, and Z. Wang, "A robust control method of two-wheeled self-balancing robot", In: 6th Int. Forum Strategic Technol. (IFOST)-IEEE, vol. 2. 2011, pp. 1031-1035. |
| [5] | C.J. Watkins, and P. Dayan, "Q-learning", Mach. Learn., vol. 8, no. 3-4, pp. 279-292, 1992. [http://dx.doi.org/10.1007/BF00992698] |
| [6] | A. Goh, "Back-propagation neural networks for modeling complex systems", Artif. Intell. Eng., vol. 9, no. 3, pp. 143-151, 1995. [http://dx.doi.org/10.1016/0954-1810(94)00011-S] |
| [7] | S. Jeong, and T. Takahashi, "Wheeled inverted pendulum type assistant robot: inverted mobile, standing, and sitting motions", In: International Conference on IEEE/RSJ, IEEE, 2007, pp. 1932-1937. |
| [8] | S. Miasa, M. Al-Mjali, A.A Ibrahim, and T. Tutunji, "Fuzzy control of a two-wheel balancing robot using dspic", In: 7th International Multi-Conference on Systems Signals and Devices (SSD), IEEE: Amman, 2010, pp. 1-6. [http://dx.doi.org/10.1109/SSD.2010.5585525] |
| [9] | S. Adam, L. Bu¸soniu, and R. Babuˇska, "Experience replay for real-time reinforcement learning control", Syst. Man Cybern., Part C: Appl. Rev., IEEE Trans., vol. 42, no. 2, pp. 201-212, 2012. |
| [10] | M.M. Botvinick, "Hierarchical reinforcement learning and decision making", Curr. Opin. Neurobiol., vol. 22, no. 6, pp. 956-962, 2012. [http://dx.doi.org/10.1016/j.conb.2012.05.008] [PMID: 22695048] |
| [11] | R.S. Sutton, D. Precup, and S. Singh, "Between mdps and semi-mdps: A framework for temporal abstraction in reinforcement learning", Artif. Intell., vol. 112, no. 1, pp. 181-211, 1999. [http://dx.doi.org/10.1016/S0004-3702(99)00052-1] |
| [12] | T.G. Dietterich, "Hierarchical reinforcement learning with the maxq value function decomposition", J. Artif. Intell. Res., vol. 13, pp. 227-303, 2000. [JAIR]. |
| [13] | R.E. Parr, Hierarchical Control and Learning for Markov Decision Processes., University of California: Berkeley, 1998. |
| [14] | B. Singer, and M. Veloso, Learning State Features from Policies to Bias Exploration in Reinforcement Learning. CMU-CS-99-122., School of Computer Science Carnegie Mellon University: Pittsburgh, 1999. |
| [15] | G. Hailu, and G. Sommer, "On amount and quality of bias in reinforcement learning", In: Syst. Man Cybern., IEEE SMC '99 Conf. Proc. 1999 IEEE Int. Conf., vol. 2. 1999, pp. 728-733. [http://dx.doi.org/10.1109/ICSMC.1999.825352] |
| [16] | D.L. Moreno, C.V. Regueiro, R. Iglesias, and S. Barro, Using Prior Knowledge to Improve Reinforcement Learning in Mobile Robotics. Proceedings Towards Autonomous Robotics Systems, University of Essex: UK, 2004, pp. 1744-8050. |
| [17] | Y-P. Lin, and X-Y. Li, "Reinforcement learning based on local state feature learning and policy adjustment", Inf. Sci., vol. 154, no. 1, pp. 59-70, 2003. [http://dx.doi.org/10.1016/S0020-0255(03)00006-9] |
| [18] | F. Fern’andez, and M. Veloso, "Probabilistic policy reuse in a reinforcement learning agent", In: Proceedings of the 5th International Joint Conference on Autonomous Agents and Multiagent Systems, ACM, 2006, pp. 720-727. [http://dx.doi.org/10.1145/1160633.1160762] |
| [19] | N. Mehta, S. Natarajan, P. Tadepalli, and A. Fern, "Transfer in variable-reward hierarchical reinforcement learning", Mach. Learn., vol. 73, no. 3, pp. 289-312, 2008. [http://dx.doi.org/10.1007/s10994-008-5061-y] |
| [20] | E.G. Schultink, R. Cavallo, and D.C. Parkes, Economic Hierarchical q-Learning., AAAI, 2008, pp. 689-695. |
| [21] | M. Stolle, and D. Precup, "Learning options in reinforcement learning", In: SARA, Springer, 2002, pp. 212-223. [http://dx.doi.org/10.1007/3-540-45622-8_16] |
| [22] | S. Mannor, I. Menache, A. Hoze, and U. Klein, "Dynamic abstraction in reinforcement learning via clustering", In: Proceedings of the Twenty-first International Conference on Machine Learning, ACM, 2004, pp. 71-80. [http://dx.doi.org/10.1145/1015330.1015355] |
| [23] | O. Simsek, A.P. Wolfe, and A.G. Barto, "Identifying useful subgoals in reinforcement learning by local graph partitioning", In: Proceedings of the 22nd International Conference on Machine Learning, ACM, 2005, pp. 816-823. |
| [24] | L. Wixson, "Scaling reinforcement learning techniques via modularity", In: Proceedings of the 8th International Workshop on Machine Learning, 2014, pp. 368-372. |