- Home
- About Journals
-
Information for Authors/ReviewersEditorial Policies
Publication Fee
Publication Cycle - Process Flowchart
Online Manuscript Submission and Tracking System
Publishing Ethics and Rectitude
Authorship
Author Benefits
Reviewer Guidelines
Guest Editor Guidelines
Peer Review Workflow
Quick Track Option
Copyediting Services
Bentham Open Membership
Bentham Open Advisory Board
Archiving Policies
Fabricating and Stating False Information
Post Publication Discussions and Corrections
Editorial Management
Advertise With Us
Funding Agencies
Rate List
Kudos
General FAQs
Special Fee Waivers and Discounts
- Contact
- Help
- About Us
- Search




The Open Electrical & Electronic Engineering Journal
(Discontinued)
ISSN: 1874-1290 ― Volume 13, 2019
Experimental Design and Verification of Extended State Observers for Magnetic Levitation System Based on PSO
Amjad J. Humaidi*
Abstract
Introduction:
This work presents analysis, design and implementation of two schemes of Extended State Observer (ESO) to estimate the position, velocity and unmeasurable states for magnetic levitation systems, Linear ESO (LESO) and Nonlinear ESO (NESO). The multiplicity of design parameters for both LESO and NESO made it difficult to find appropriate setting of these parameters such that to reach satisfactory performance of observation process.
Methods:
Particle Swarm Optimization (PSO) technique is used to improve performance of observation process by finding optimal tuned parameters of observer design parameter subjected to specified performance index. Theoretical results of both observers are firstly implemented in the environment of MATLAB/SIMULINK. Then, experimental state estimation of observers is set up based on feedback instrument (33-942S) to verify the simulated results.
Results and Conclusion:
Root Mean Square (RMS) of estimation error has been used as an indicator to assess the performance of observers. The simulated and practical results showed that LESO could give better estimation performance than NESO.
Article Information

Identifiers and Pagination:
Year: 2018Volume: 12
First Page: 110
Last Page: 120
Publisher Id: TOEEJ-12-110
DOI: 10.2174/1874129001812010110
Article History:
Received Date: 11/9/2018Revision Received Date: 20/11/2018
Acceptance Date: 28/11/2018
Electronic publication date: 28/12/2018
Collection year: 2018
open-access license: This is an open access article distributed under the terms of the Creative Commons Attribution 4.0 International Public License (CC-BY 4.0), a copy of which is available at: https://creativecommons.org/licenses/by/4.0/legalcode. This license permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
* Address correspondence to this author at the Control ad Systems Engineering Department, University of Technology, Baghdad, Iraq; Tel: +964-7901227676; E-mails: 601116@uotechnology.edu.iq; aaaacontrol2010@yahoo.com
| Open Peer Review Details | |||
|---|---|---|---|
| Manuscript submitted on 11-9-2018 |
Original Manuscript | Experimental Design and Verification of Extended State Observers for Magnetic Levitation System Based on PSO | |
1. INTRODUCTION
The observer is an indispensable tool for most advanced feedback control strategies. Their main role is to estimate the unmeasurable sates or disturbances for large applications of observer-based control. Practically, usage of observer can give less reduction of weights and cost and increase the system measuring reliability as compared to the case of employing the actual sensors [1M. Algarawi, "Non-linear Discrete Time Observer Design by Sliding Mode", Ph.D. Thesis, School of Engineering and Design.: Brunel University, .].
On the contrary of linear observer theory, which has approximately reached to a saturation point, researches on nonlinear systems observers are still premature and far away from complete. Actually, design methodologies, stability analysis and formulation of nonlinear observer for nonlinear systems still encounter hard difficulties. In this context, the enlargement of stability region of attraction for nonlinear observer is the challenging problem which attracted many researchers who proposed many approaches to solve this problem. One solution is based on expansion or linearization irrespective to system complexity such as Leunberger observer and Kalman filters for nonlinear systems [2A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA
[http://dx.doi.org/10.1109/ACC.2006.1657545] ].
The Luenberger observer (1971), which is a linear observer, has been the essential approach in designing the state estimators in control theory. The works proposed by Arthur J. Krener and Alberto Isidori (1983), Arthur Krener and Wiltold Respondek (1985), and Xiaohua Xia and Wei Gao (1989) had firstly addressed the theory of observers in nonlinear system by approximating the nonlinear dynamic of observation error to linear structure by imposing a set of conditions. However, the necessary and sufficient conditions of such observation approaches, like the feedback linearization problem, are somewhat restrictive [1M. Algarawi, "Non-linear Discrete Time Observer Design by Sliding Mode", Ph.D. Thesis, School of Engineering and Design.: Brunel University, ., 2A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA
[http://dx.doi.org/10.1109/ACC.2006.1657545] ].
Another contribution to the linearization technique is made by Zeitz (1987), which proposed an algorithm that extends the Luenberger observer for nonlinear systems. This algorithm used input time derivatives and it was easy to implement. However, the critical issue with this technique is that the convergence of the Luenberger observer cannot be guaranteed. Later in 1989, Tornambe presented an approach to cancel the nonlinearity based on high gain approximation. The main drawback with this algorithm is that it cannot guarantee asymptotic convergence of estimation error to zero with arbitrarily finite high gain in spite that the error might be bounded and the initial conditions of both system and observer states have to be set synchronously [1M. Algarawi, "Non-linear Discrete Time Observer Design by Sliding Mode", Ph.D. Thesis, School of Engineering and Design.: Brunel University, ., 2A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA
[http://dx.doi.org/10.1109/ACC.2006.1657545] ].
In 1990, an adaptive observer was proposed by Marino for Single Input-Single Output (SISO) nonlinear systems. The difficulty with this observer is that the nonlinear system is either in (or transformed to) an observable canonical form. The work presented by Bastin and Gevers (1988) could establish the necessary and sufficient conditions that transform the nonlinear system into observable canonical form. However, such conditions are restrictive since transforming the observer to canonical form may be difficult to be found. Although this adaptive observer does not require the full information of dynamic systems model, it can guarantee asymptotic stability to only finite error [3H.K. Khalil, and L. Praly, "High-gain observers in nonlinear feedback control", Int. J. Robust Nonlinear Control, vol. 24, pp. 993-1015.
[http://dx.doi.org/10.1002/rnc.3051] ].
In 1990, Tsinias proposed an observer which is able to guarantee the convergence of estimated states of observer to the actual states. In 1992, Gauthier et al. presented a contribution to the nonlinear observation theory by introducing an observer which can asymptotically track the states of nonlinear system in such a way that the Lyapunov equation can be determined by observer gain. However, the existence of globally defined and globally Lipschitzian change of coordinates is a prerequisite of this observation method. It was shown that for any nonlinear system which is observable to any input, an observer with global convergence can be found. Gauthier et al. could present an alternative proof to show this hypothesis [2A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA
[http://dx.doi.org/10.1109/ACC.2006.1657545] ].
In 1992, Khalil and Esfandiari presented a new observer for output feedback control design called High-Gain Observer (HGO). HGO shows robust characteristics in estimating the unmeasured states and asymptotic attenuation of disturbances. Later in 1999, Attassi etal proved that the separation principle can be achieved with HGO for a wide class of systems and this was the basis in solving many nonlinear system problems [4H.K. Khalil, Nonlinear Control., Pearson Educational Limited: England, ., 5Amjad J. Humaidi, and A.A. Mohammed, "Performance comparison of different observers for pendubot", j engin technol, sci, vol. 34, no. 1, pp. 34-53.]. In 2008, a modified version of HGO named as an Extended High Gain Observer (EHGO) has been proposed by Freidovich. The observer was used to reduce the effect of model errors and unknown disturbances in fully actuated mechanical systems [6E. Bou Rachel, and K. Hassan, "Application of the extended high gain observer to underactuated mechanical systems’, IEEE", Ame Cont Conf (ACC), ., 7L.B. Freidovich, and H.K. Khalil, "Performance recovery of feedback-linearization based designs’ Automatic Control", IEEE Trans, vol. 53, no. 10, pp. 2324-2334.].
Other efficient tool for observation is the sliding mode observers. The development of this type is contributed by pioneers of researchers such as Slotine, Utkin and Walcott [8S.K. Spurgeon, Sliding Mode Observers-toward a constructive design framework., Spring School: Aussois, .]. These observers are basically based on sliding theory and can solve the problem of peaking phenomenon seen in HGO. They are able to offer finite-time convergence, and robustness with respect to uncertainties and the possibility of uncertainty estimation. Second sliding mode observer, super twisting sliding mode observer and adaptive sliding mode observer are other advanced versions of sliding mode observer, which recently used in many applications [8S.K. Spurgeon, Sliding Mode Observers-toward a constructive design framework., Spring School: Aussois, ., 9H. Rios, D. Efimov, and W. Perruquetti, An adaptive sliding mode observer for a class of uncertain nonlinear systems, International J Signal Processing.
[http://dx.doi.org/10.1002/acs.2857] ].
In 1995, J. Han introduced a unique observer design by class of Nonlinear Extended State Observers (NESO). The main feature with this observer is that it does not depend on plant mathematical model. Thus, enhanced robustness has been achieved and it was verified and applied in different industrial observer-based control applications [10Amjad J. Humaidi, and H. M. Badir, Linear and nonlinear active rejection controllers for single-link flexible joint robot manipulator based on PSO tuner, APRN, J. Eng Applied Sciences, Vol. 13, No. 6,-12G. Wang, "Observer-Based on Feedback Control Methods for Underactuated Robot System", M.Sc. Thesis, Simon Fraser University: Canada, .].
Generally, the observers can be divided into three groups: linear, non-linear and disturbance observers. The linear and nonlinear observers mainly rely on the mathematical model of considered systems including the knowledge of existing noises and disturbances. More exact model information will give better estimation accuracy of such observers. On the other hand, the disturbance observer is concerned with input-output data. This type of observer can tackle systems of high nonlinearities and uncertainties and has the capability to disturbance rejection effectively. Fig. (1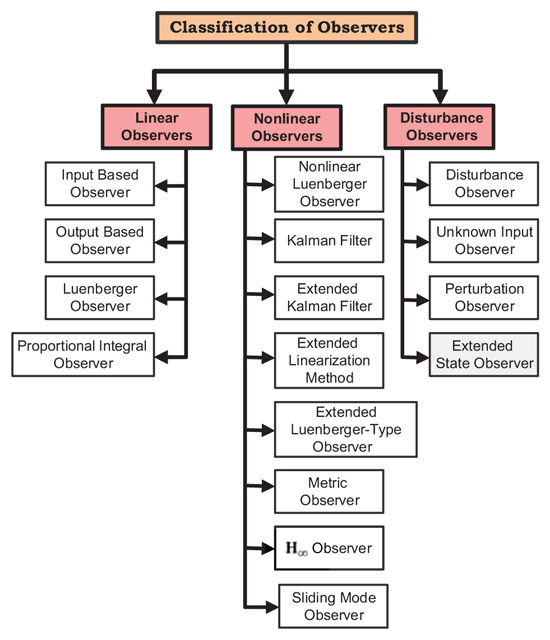 ) illustrates the details of observer classification [1M. Algarawi, "Non-linear Discrete Time Observer Design by Sliding Mode", Ph.D. Thesis, School of Engineering and Design.: Brunel University, ., 2A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA
) illustrates the details of observer classification [1M. Algarawi, "Non-linear Discrete Time Observer Design by Sliding Mode", Ph.D. Thesis, School of Engineering and Design.: Brunel University, ., 2A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA
[http://dx.doi.org/10.1109/ACC.2006.1657545] ].
The present work focuses on design and real-time verification of two Extended State Observers (ESO), linear and nonlinear observer. The Particle Swarm Optimization (PSO) method has been used to find optimal design parameters of linear and nonlinear observers for further improvement of their performance towards more accurate estimation.
 |
Fig. (1) General Classification of Observers. |
2. MODELING OF MAGNETIC LEVITATION (MAGLEV) SYSTEM
Maglev system is a single degree-of-freedom which basically operates on the principle of levitation force. This force is generated by a magnetic field, which is established and controlled by the coil current. This electromagnetic force attracts up the ferromagnetic ball of the Maglev system. The system contains a sensor which determines the actual position of ball and a driver which is responsible for actuating the current in the coil. The schematic representation for the position control of system ball is depicted in Fig. (2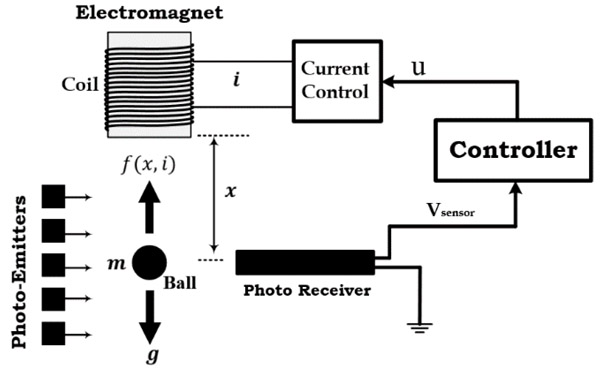 ). The figure indicates that the controller receives the reference signal and feedback signal from the sensor (both in volt) and manipulates the error signal to give a satisfactory response. The error control signal is converted into a corresponding current control signal by the current controller to actuate the system coils [10Amjad J. Humaidi, and H. M. Badir, Linear and nonlinear active rejection controllers for single-link flexible joint robot manipulator based on PSO tuner, APRN, J. Eng Applied Sciences, Vol. 13, No. 6,].
). The figure indicates that the controller receives the reference signal and feedback signal from the sensor (both in volt) and manipulates the error signal to give a satisfactory response. The error control signal is converted into a corresponding current control signal by the current controller to actuate the system coils [10Amjad J. Humaidi, and H. M. Badir, Linear and nonlinear active rejection controllers for single-link flexible joint robot manipulator based on PSO tuner, APRN, J. Eng Applied Sciences, Vol. 13, No. 6,].
 |
Fig. (2) The schematic representation of Maglev System. |
Using Kirchhoff’s voltage law, the applied voltage u (t) can be divided into voltage VR (across the coil resistor R) and VL (across coil inductance) [10Amjad J. Humaidi, and H. M. Badir, Linear and nonlinear active rejection controllers for single-link flexible joint robot manipulator based on PSO tuner, APRN, J. Eng Applied Sciences, Vol. 13, No. 6,];
 |
(1) |
where i is the current flowing in the coil. Using the above equation, the coil current can be obtained,
 |
(2) |
Since practically R >> L, then the term e-(R/L)t would reach to zero in a fast exponential decay; Therefore, the above equation becomes
 |
(3) |
where k1 is a proportionality constant.
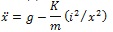
According to Newton's Laws of motion and Fig. (2), one can relate the electromagnetic force f (x, i) to the mass of ferromagnetic ball musing the following equation;
 |
(4) |
where x is the distance between ball center and Maglev coil, a and g are the gravities due to acceleration and gravity, respectively.
It is known that the electromagnetic force f (x, i) is a function of position and current, which can be described by:
 |
(5) |
where K represents the electromagnetic constant. Considering a =
 and using Eq. (4) and (5), one can obtain
and using Eq. (4) and (5), one can obtain
 |
(6) |
If the state variables x1 and x2 are assigned to the ball position and velocity, respectively, then
 and the following state variable system can be reached;
and the following state variable system can be reached;
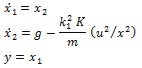 |
(7) |
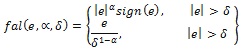
The above equation can be reformulated as
 |
(8) |
where b is an estimate value and the function f has been used to lump the uncertainty, disturbance and nonlinearty effected on system
 This term has to be continuous and differentialble so that ESO has to be applied properly.
This term has to be continuous and differentialble so that ESO has to be applied properly.
3. EXTENDED STATE OBSERVER (ESO)
Extended state observer has the capability to estimate the state without the need of the system mathematical model. ESO cannot only estimate the state, but also the external and internal disturbances. The emerging of ESO made a revolutionary concept for control theory and applications and the evolution of this estimation method could significantly promote the state feedback control of nonlinear dynamic systems. This observer is characterized by model independence, compensation for disturbances active estimation, strong robustness and simple design. Additionally, the ESO could find a solution to classes of uncertain systems [11W. Wang, "A comparative study of nonlinear observers and control design strategies ", Ph.D. Thesis, Guangxi University, P.R. China, ., 12G. Wang, "Observer-Based on Feedback Control Methods for Underactuated Robot System", M.Sc. Thesis, Simon Fraser University: Canada, .].
3.1. Nonlinear Extended State Observers (NESO)
The extended state model of Eq. (8) is established by assigning a new state to the lumped function; i.e, x3 = f , as indicated by the following extended state equation,
 |
(9) |
In state space form, Eq. (8) can be written as;
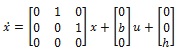 |
(10) |
where
 The proposed nonlinear extended state observer is given by;
The proposed nonlinear extended state observer is given by;
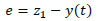
 |
(11) |
when
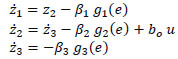
 is the estimate of the state f, which assumed to be zero. The observer described by Eq. (11) is the NESO observer for the system (8), where b 0 is the normal value of b and gi (e) = fal which defined as follow:
is the estimate of the state f, which assumed to be zero. The observer described by Eq. (11) is the NESO observer for the system (8), where b 0 is the normal value of b and gi (e) = fal which defined as follow:
 |
fal is a nonlinear gain function. Fig. (3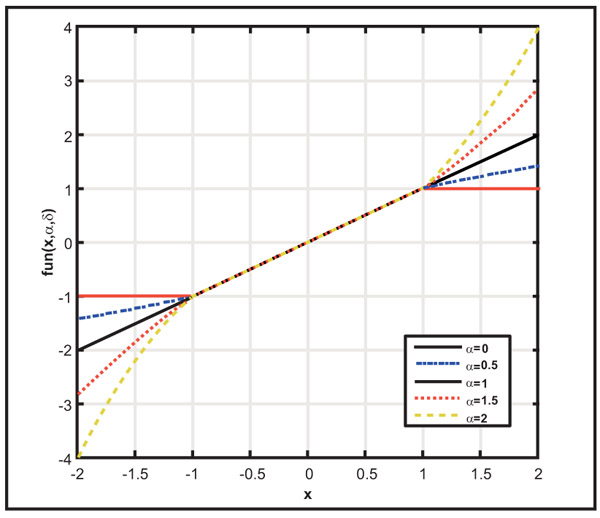 ) clarifies the difference between the linear and nonlinear gains. The parameter δ discriminates the linear and nonlinear region. The errors less (greater) than δ submit to linear (nonlinear) characteristics of the nonlinear fal function. In nonlinear region, the effect of parameter α is indicated in Fig. (3). It is clear from the figure that function becomes linear for all values of error with the value α = 1.
) clarifies the difference between the linear and nonlinear gains. The parameter δ discriminates the linear and nonlinear region. The errors less (greater) than δ submit to linear (nonlinear) characteristics of the nonlinear fal function. In nonlinear region, the effect of parameter α is indicated in Fig. (3). It is clear from the figure that function becomes linear for all values of error with the value α = 1.
 |
Fig. (3) Comparison of Linear and Nonlinear Gains. |
3.2. Linear Extended State Observers (LESO)
Consider a generally nonlinear time-varying second order dynamic system (7). Since the term f in Eq.(8) is now a new state in the extended state model, the LESO described by Eq. (10) would estimate the derivatives of both y and f. With y and u as inputs, the LESO defined of Eq. (8) becomes
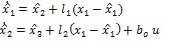 |
(12) |
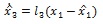 |
where
 , and l1, l2 and l3 are the observer gains to be properly chosen. The choice of these observer gains are selected in such a way to guarantee the characteristic polynomial S2 + l1S2 + l2S + l3 to be Hurwitz. This characteristic polynomial can be written as follows:
, and l1, l2 and l3 are the observer gains to be properly chosen. The choice of these observer gains are selected in such a way to guarantee the characteristic polynomial S2 + l1S2 + l2S + l3 to be Hurwitz. This characteristic polynomial can be written as follows:
 |
(13) |
where wo is the observer bandwidth and
 The method is used to decouple between observer bandwidth and gain is called parameterization, which is firstly proposed by Gao [14Z. Gao, "Scaling and Parameterization based controller tuning", Proc. Am. Control Conf., vol. 6, pp. 4989-4996., 15J. Han, "From PID to active disturbance rejection control", IEEE Trans. Ind. Electron., vol. 56, no. 3, pp. 900-906.
The method is used to decouple between observer bandwidth and gain is called parameterization, which is firstly proposed by Gao [14Z. Gao, "Scaling and Parameterization based controller tuning", Proc. Am. Control Conf., vol. 6, pp. 4989-4996., 15J. Han, "From PID to active disturbance rejection control", IEEE Trans. Ind. Electron., vol. 56, no. 3, pp. 900-906.
[http://dx.doi.org/10.1109/TIE.2008.2011621] ]. In general, larger bandwidth of observer leads to more accurate estimation. However, the increase of observer bandwidth will raise the noise sensitivity. As such, the proper selection of observer bandwidth should compromise between noise tolerance and tracking performance.
4. PSO-BASED OBSERVATION PROCESS
Try and error procedure to find the best values for specified performance index is cumbersome and exhaustive and does not lead to an optimal solution. As such, auto-tuning tools like genetic, foraging, artificial bee colony and particle swarm optimization techniques are used instead. In the present work, PSO is used due to its high speed and efficiency. The PSO technique is inspired from social organisms such as bees, ants, flock of birds and school of fish. Mathematically, PSO algorithm permits to find the global minimum (or maximum) for many optimized problems. Individuals are called as particles in PSO. A particle represents a potential solution to a problem. Design parameters and the objective functions are the main elements of such technique. Generally, the objective of PSO algorithms is to find, in an autonomous manner, the optimal solution of design parameters which satisfies the minimum (or maximum) objective function of the problem.
Here, PSO-based optimization is used to find a set of NESO and LESO parameters such that a specific performance index for NESO and LESO is minimized.
In the problem of optimized performance for observation process, there are different particles for nonlinear observer and different particles for linear observer. Each particle has N population size and the update equation of each particle velocity and position within the PSO environment is given by [16J. Kennedy, and R.C. Eberhart, "Particle swarm optimization", Proc 1995 IEEE Int Conf Neural Networks, .Piscataway, NJ, 17Y. Shi, and R.C. Eberhart, "Parameter selection in particle swarm optimization", Proc 7th Annual Conf Evolut Program, Springer-Verlag, pp. 591-600.Berlin, Germany
[http://dx.doi.org/10.1007/BFb0040810] ],
 |
(14) |
where, vj (i) and xi (i) are the velocity and position of jth particle at ith iteration, respectively. The coefficient is the cognitive learning rate, while coefficient c2 is the social learning rate. The random numbers r1 and r2 ranges between (0-1). The weight w is added to adjust the amount of velocity damping of particles over time.
The performance index is a quantitative measure to test the performance of the NESO and LESO. In this paper, RMS with the max overshoot has been taken as a performance index, which is given.
 |
where e1 and e2 stands for position and velocity estimation errors, respectively. The parameters Mp1 and Mp2 have been added to avoid the access of max overshoots in position and velocity responses, respectively. The PSO was applied in order to find the optimal observers parameters which give the most accurate estimation.
5. RESULTS OF REAL-TIME IMPLEMENTATION
The designed observers along with optimized parameters are applied to a real-time laboratory magnetic levitation system designed by feedback instruments. Fig. (4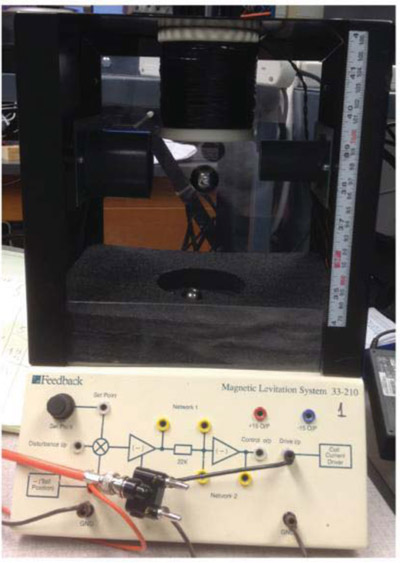 ) shows the experimental set-up of observers (LESO and NESO) for a magnetic levitation system using Feedback device (33-942S) [18Y. Shi, and R.C. Eberhart, "Parameter selection in particle swarm optimization", Proc 7th Annual Conf Evolut Program, Springer-Verlag, pp. 591-600.Berlin, Germany
) shows the experimental set-up of observers (LESO and NESO) for a magnetic levitation system using Feedback device (33-942S) [18Y. Shi, and R.C. Eberhart, "Parameter selection in particle swarm optimization", Proc 7th Annual Conf Evolut Program, Springer-Verlag, pp. 591-600.Berlin, Germany
[http://dx.doi.org/10.1007/BFb0040810] ].
 |
Fig. (4) Feedback instrument of magnetic levitation system. |
The experimental observer-based magnetic levitation system consists of levitation coil, ferrite ball, driver, sensor and Personal Computer (PC). The observer algorithms (ELSO and NELSO) are implemented within MATLAB environment (R2016b). Both ELSO and NELSO receive the input signal from MATLAB software, while the real ball position is measured from the hall sensor shown in Fig. (4). However, the feedback device supplies a simple PID controller to stabilize the ball at equilibrium position. The control signal from PID controller actuates the coil via a driver (Feedback 33-210).
Table 1 lists the parameters of considered magnetic levitation systems.
It is worthy to mention that the model of Maglev system, described in Eq. (7), is only for theoretical analysis. However, the model developed by feedback instruments (33-942S) take into account some practical aspects and measurement. For instant, the position is expressed in volts instead of meter. The model supplied by feedback instruments is given by [18Y. Shi, and R.C. Eberhart, "Parameter selection in particle swarm optimization", Proc 7th Annual Conf Evolut Program, Springer-Verlag, pp. 591-600.Berlin, Germany
[http://dx.doi.org/10.1007/BFb0040810] ];
 |
where the position is measured in voltage scale. This would motivate us to set-up a new optimization process for optimal tuning of parameters before indulging into experimental results. Table 2 gives the settings of PSO algorithm. Tables 3 and 4 report the optimized design parameters of LESO and NESO, respectively.
The above tuning process took into account the ranges of α and δ to be 0 < α ≤ 1 and 0 < α < 1.2, respectively.
Before starting observation process, the magnetic levitation system has to be firstly stabilized. The stabilization controller used for this systems is a simple proportional integral derivative (PID) controller. The suitably selected setting of controller terms for the satisfactory response of magnetic levitation systems Kp = 4.2, Kl = 2.2 and KD = 0.02.
The first scenario of state estimation is based on simulated results within MATLAB/SIMULINK environment. Fig. (5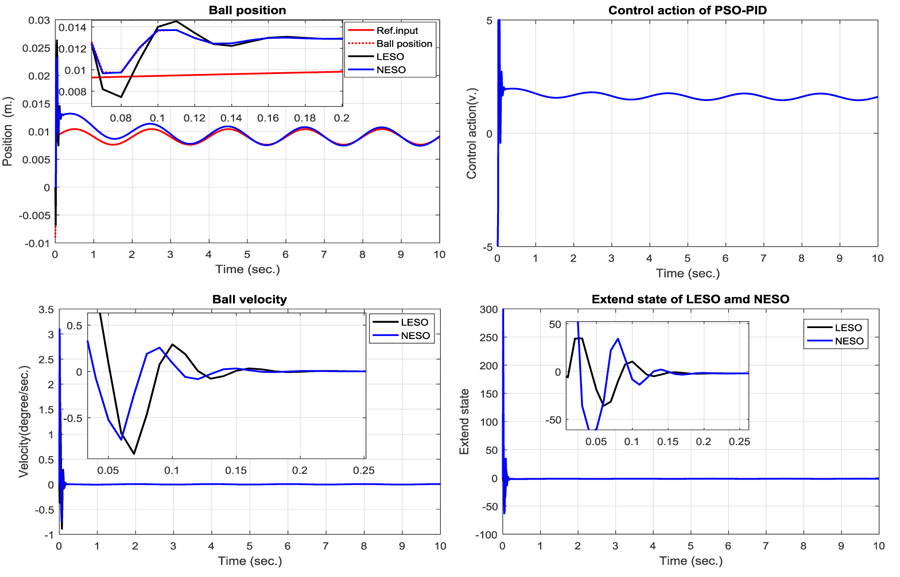 ) shows the estimated states of ball position, velocity and the extended state representing the lumping of nonlinearity by both LESO and NESO. The measure of observer performance is based on Root Mean Square Error (RMSE) between the actual measurement and estimated state. The best observer is the one that has less RMSE. Table 5 reports that the RMSE resulting from LESO is less than obtained from NESO, which means that LESO has better observation characteristics than NESO.
) shows the estimated states of ball position, velocity and the extended state representing the lumping of nonlinearity by both LESO and NESO. The measure of observer performance is based on Root Mean Square Error (RMSE) between the actual measurement and estimated state. The best observer is the one that has less RMSE. Table 5 reports that the RMSE resulting from LESO is less than obtained from NESO, which means that LESO has better observation characteristics than NESO.
The second scenario represents the realization of both observers in real time environment using Feedback magnetic levitation device. Fig. (5) shows the estimates of LESO and NESO, which stands for ball position, velocity and the lumped nonlinearity of Eq.(8). Again, based on RMSE measurements, LESO shows better performance than NESO as indicated in Table (5).
 |
Fig. (5) The estimation of ball position, velocity and extended state for LESO and NESO based on simulation results. |
 |
Fig. (6) The estimation of ball position, velocity and extended state for LESO and NESO based on experimental results. |

CONCLUSION
In this paper, two types of extended state observers, linear and nonlinear, are addressed for the magnetic levitation system. The observers are applied in order to estimate the velocity of ball and the unmeasured states of the magnetic levitation system from the measured ones. Based on the information reported in Table 5, one can conclude that LESO has better performance than NESO in terms of estimation error they produce.
CONSENT FOR PUBLICATION
Not applicable.
CONFLICT OF INTEREST
The author declares no conflict of interest, financial or otherwise.
ACKNOWLEDGEMENTS
Declared none.
REFERENCES
| [1] | M. Algarawi, "Non-linear Discrete Time Observer Design by Sliding Mode", Ph.D. Thesis, School of Engineering and Design.: Brunel University, . |
| [2] | A. Radke, and Z. Gao, "A survey of state and disturbance observers for practitioners", Proce Ame Cont Conf, .Minneapolis, Minnesota, USA [http://dx.doi.org/10.1109/ACC.2006.1657545] |
| [3] | H.K. Khalil, and L. Praly, "High-gain observers in nonlinear feedback control", Int. J. Robust Nonlinear Control, vol. 24, pp. 993-1015. [http://dx.doi.org/10.1002/rnc.3051] |
| [4] | H.K. Khalil, Nonlinear Control., Pearson Educational Limited: England, . |
| [5] | Amjad J. Humaidi, and A.A. Mohammed, "Performance comparison of different observers for pendubot", j engin technol, sci, vol. 34, no. 1, pp. 34-53. |
| [6] | E. Bou Rachel, and K. Hassan, "Application of the extended high gain observer to underactuated mechanical systems’, IEEE", Ame Cont Conf (ACC), . |
| [7] | L.B. Freidovich, and H.K. Khalil, "Performance recovery of feedback-linearization based designs’ Automatic Control", IEEE Trans, vol. 53, no. 10, pp. 2324-2334. |
| [8] | S.K. Spurgeon, Sliding Mode Observers-toward a constructive design framework., Spring School: Aussois, . |
| [9] | H. Rios, D. Efimov, and W. Perruquetti, An adaptive sliding mode observer for a class of uncertain nonlinear systems, International J Signal Processing. [http://dx.doi.org/10.1002/acs.2857] |
| [10] | Amjad J. Humaidi, and H. M. Badir, Linear and nonlinear active rejection controllers for single-link flexible joint robot manipulator based on PSO tuner, APRN, J. Eng Applied Sciences, Vol. 13, No. 6, |
| [11] | W. Wang, "A comparative study of nonlinear observers and control design strategies ", Ph.D. Thesis, Guangxi University, P.R. China, . |
| [12] | G. Wang, "Observer-Based on Feedback Control Methods for Underactuated Robot System", M.Sc. Thesis, Simon Fraser University: Canada, . |
| [13] | B-Z. Guo, "Zhao extended state observer for nonlinear systems with uncertainty", 18th IFAC World Congress, .Milano (Italy) |
| [14] | Z. Gao, "Scaling and Parameterization based controller tuning", Proc. Am. Control Conf., vol. 6, pp. 4989-4996. |
| [15] | J. Han, "From PID to active disturbance rejection control", IEEE Trans. Ind. Electron., vol. 56, no. 3, pp. 900-906. [http://dx.doi.org/10.1109/TIE.2008.2011621] |
| [16] | J. Kennedy, and R.C. Eberhart, "Particle swarm optimization", Proc 1995 IEEE Int Conf Neural Networks, .Piscataway, NJ |
| [17] | Y. Shi, and R.C. Eberhart, "Parameter selection in particle swarm optimization", Proc 7th Annual Conf Evolut Program, Springer-Verlag, pp. 591-600.Berlin, Germany [http://dx.doi.org/10.1007/BFb0040810] |
| [18] | Y. Shi, and R.C. Eberhart, "Parameter selection in particle swarm optimization", Proc 7th Annual Conf Evolut Program, Springer-Verlag, pp. 591-600.Berlin, Germany [http://dx.doi.org/10.1007/BFb0040810] |