- Home
- About Journals
-
Information for Authors/ReviewersEditorial Policies
Publication Fee
Publication Cycle - Process Flowchart
Online Manuscript Submission and Tracking System
Publishing Ethics and Rectitude
Authorship
Author Benefits
Reviewer Guidelines
Guest Editor Guidelines
Peer Review Workflow
Quick Track Option
Copyediting Services
Bentham Open Membership
Bentham Open Advisory Board
Archiving Policies
Fabricating and Stating False Information
Post Publication Discussions and Corrections
Editorial Management
Advertise With Us
Funding Agencies
Rate List
Kudos
General FAQs
Special Fee Waivers and Discounts
- Contact
- Help
- About Us
- Search




The Open Electrical & Electronic Engineering Journal
(Discontinued)
ISSN: 1874-1290 ― Volume 13, 2019
Formulizing the Fuzzy Rule for Takagi-Sugeno Model in Network Traffic Control
Mohammad Alhihi1, *, Mohammad Reza Khosravi2
Abstract
Background:
Nowadays, fuzzy logic theory is a popular approach to control network variables in engineering problems such as computer and communication networking. In this research, we formulize a new fuzzy logic-based rule for an important engineering application, i.e., traffic control of communication networks.
Method:
In this regard, we propose a new formulization based on a well-known model of traffic control in the networks entitled Takagi-Sugeno. Towards this modeling, we use a typical Fuzzy Neural Network (FNN) with an optimizer based on Genetic Algorithm (GA).
Conclusion:
The simulation results of our new model clearly prove that the proposed model and its formulation are approximately according to a theoretically consumed model for the problem. In details, we suppose two arbitrary examples for the problem which have two different assumed solutions, and then, we try to resolve the problem for both conditions based on the model in which the simulations show relatively similar results for both simulation-based and theoretical results in both examples.
Article Information

Identifiers and Pagination:
Year: 2018Volume: 12
First Page: 1
Last Page: 11
Publisher Id: TOEEJ-12-1
DOI: 10.2174/1874129001812010001
Article History:
Received Date: 01/12/2017Revision Received Date: 12/12/2017
Acceptance Date: 15/01/2018
Electronic publication date: 12/02/2018
Collection year: 2018
open-access license: This is an open access article distributed under the terms of the Creative Commons Attribution 4.0 International Public License (CC-BY 4.0), a copy of which is available at: https://creativecommons.org/licenses/by/4.0/legalcode. This license permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
* Address correspondence to this author at the Department of Communications and Electronic Engineering, Philadelphia University, Amman, Jordan; Tel: 0798961365; E-mail: malhihi@philadelphia.edu.jo
| Open Peer Review Details | |||
|---|---|---|---|
| Manuscript submitted on 01-12-2017 |
Original Manuscript | Formulizing the Fuzzy Rule for Takagi-Sugeno Model in Network Traffic Control | |
1. INTRODUCTION
The fuzzy logic-based systems are one of the most important applications of the fuzzy logic and fuzzy-set theory in soft computing and applied mathematics [1U. Sandler, and L. Tsitolovsky, Neural Cell Behavior and Fuzzy Logic., Springer International Publishing, . ISBN: 978-0-387-09542-4] which are widely used for solving control problems in all aspects of engineering. A main application of this theory towards control of communication networks is traffic control for the networks and their supporting complex systems [2G. Kuchuk, A. Kovalenko, V. Kharchenko, and A. Shamraev, Resource-oriented approaches to implementation of traffic control technologies in safety-critical I&C systems.Book: Green IT Engineering: Components, Network, and Systems Implementation., Springer International Publishing, pp. 313-337.
[http://dx.doi.org/10.1007/978-3-319-55595-9_15] ]. The popularity of fuzzy logic-based control mechanism in such networks and systems can be explained by their complex and corresponding properties. At first, these mechanisms provide a suitable way for manipulation of some network variables, however on the other hand, they have several universal approximate properties which can be useful. These dual aspects of control mechanisms are used for building of two types of fuzzy logic-based systems [3S. Guillaum, "Designing Fuzzy Inference systems from Data: An Interpretability-Oriented Review", IEEE Trans. Fuzzy Syst., vol. 9, no. 2, pp. 426-443.
[http://dx.doi.org/10.1109/91.928739] ].
The first type realizes a suitable capacity of fuzzy logic for natural language modeling. The second type of fuzzy systems is based on the auto-generation model of rules from a dataset. While constructing the fuzzy system under the experimental data and for definition of the compatibility of generated rule set with the initial dataset, the Root Mean Square Error (RMSE) is usually used as error computation metric. Thus, minimizing the value of this metric as an optimization problem must be formulated and solved in order to have the best fuzzy model for a complex problem (while constructing a rule as Eq. (1)). In fact, the RMSE metric is not only an indicator for evaluation of the accuracy of numerical outputs of the model generated, but it is used as a feedback for creating the best model. So, when the model is created, it surely has the least value in terms of RMSE. In the current work, we are going to use such rules for an interesting engineering approach used for traffic control of communication networks which is entitled Takagi-Sugeno approach [4H. Takagi, and M. Sugeno, "Fuzzy identification of systems and its application to modeling and control", IEEE Trans. Syst. Man Cybern., vol. 15, no. 1, pp. 116-132.
[http://dx.doi.org/10.1109/TSMC.1985.6313399] ] and under the use of RMSE indicator as the main feedback.
As follows, we review some existing approaches for formulating the fuzzy rule-based issue in similar cases. In some related works such as [4H. Takagi, and M. Sugeno, "Fuzzy identification of systems and its application to modeling and control", IEEE Trans. Syst. Man Cybern., vol. 15, no. 1, pp. 116-132.
[http://dx.doi.org/10.1109/TSMC.1985.6313399] -5N. Nomura, I. Hayashi, and N. Wakami, A Self Tuning Method of Fuzzy Control by Descent Method, Book: Fuzzy Logic Theory and Decision Library, Springer International Publishing, pp. 155-158.], other metrics can be used as error indicator. For example, the Least-Square (LS) and the gradient descent were used as error indicator in [4H. Takagi, and M. Sugeno, "Fuzzy identification of systems and its application to modeling and control", IEEE Trans. Syst. Man Cybern., vol. 15, no. 1, pp. 116-132.
[http://dx.doi.org/10.1109/TSMC.1985.6313399] ] and [5N. Nomura, I. Hayashi, and N. Wakami, A Self Tuning Method of Fuzzy Control by Descent Method, Book: Fuzzy Logic Theory and Decision Library, Springer International Publishing, pp. 155-158.], respectively. However, in these two cases, there are also needs to the adjustment of gradient of membership functions where these functions realize the fuzzy inference under the selected criterion, so we prefer to use a different way as mentioned. It may be known as a problem for stagnation in the local extremum. In this way, a problem of the development of the more adaptable methods of fuzzy rules is generated for auto-generation and capable of searching feasible solutions at the broad expanse. In fact, in this work, we propose the solution of this problem using a strong artificial intelligence method, i.e., the development of fuzzy network along with genetic algorithm. The selection of the artificial intelligence methods as optimization tools is explained by the capability of fast finding of the global extremum under a desired accuracy as well as this condition that we have no limitations on the cost function of the optimization problem.
Our work in terms of application to network traffic control is a general approach. However, the most desired networks which are considered in this application are a kind of core networks. Traffic control is a very important area in network design which has many different approaches, such as models developed based on the fuzzy schemes. Thus, we aim to develop and formulize the Takagi-Sugeno fuzzy model for these applications theoretically. In particular, when managing the traffic of computer networks supporting complex systems, for example, in safety-critical I&C systems, with changing the network architecture, it is necessary to quickly solve the traffic management problem including redistribute routes [2G. Kuchuk, A. Kovalenko, V. Kharchenko, and A. Shamraev, Resource-oriented approaches to implementation of traffic control technologies in safety-critical I&C systems.Book: Green IT Engineering: Components, Network, and Systems Implementation., Springer International Publishing, pp. 313-337.
[http://dx.doi.org/10.1007/978-3-319-55595-9_15] ]. However, many additional conditions arise, most of which are difficult to formalize. Therefore, standard methods of traffic management do not allow you to get the result with the necessary accuracy for an acceptable time. In this case, the result can be obtained more quickly with using fuzzy inference systems. The popularity of such systems is explained by their dual properties.
This paper is organized as follows. Our fuzzy model developed based on Takagi-Sugeno approach [4H. Takagi, and M. Sugeno, "Fuzzy identification of systems and its application to modeling and control", IEEE Trans. Syst. Man Cybern., vol. 15, no. 1, pp. 116-132.
[http://dx.doi.org/10.1109/TSMC.1985.6313399] ] is presented in the second section. Third section explains how with combining the fuzzy model and neural network, we can optimize the model. Forth section explains how the GA optimizer helps to the stated problem. The fifth section is related to the simulation results. The last section is allocated to the conclusions.
2. PROPOSED TAKAGI-SUGENO FUZZY MODEL
Based on the mentioned concepts in the past section, a minimization based on the metric is required. Now, we want to introduce this metric. Its amount is according to Eq. (1) in general form of the problem.
 |
(1) |
where yi is the value obtained for the same entry under the use of fuzzy rule towards generating a formulated model in which the rule consists of N sets of the input values and the relevant outputs. Use of the Mamdani fuzzy model provides fuzzy variables towards a suitable way for integration of knowledge into the model when the system behavior is described by natural language. However, there are such situations, when it is impossible to describe properly the system with using the advantages of the expert knowledge, for instance, in a complex system, when number of connections and regularities are exceptionally increased. In such case, we need to the rule towards auto-generation. For the purpose of receiving the fuzzy knowledge database from the test results, it is much better to use the fuzzy rules according to the Takagi-Sugeno model. The fuzzy Takagi-Sugeno model was introduced in [4H. Takagi, and M. Sugeno, "Fuzzy identification of systems and its application to modeling and control", IEEE Trans. Syst. Man Cybern., vol. 15, no. 1, pp. 116-132.
[http://dx.doi.org/10.1109/TSMC.1985.6313399] ]. It is based on the rules, the right sequence of which is not represented as a linguistic variable, but as an input (variables) function, i.e., if x1 is included in A1 and x2 is in A2 and … and xk is in Ak, then we have Eq. (2) (xi belongs to the set Ai).
 |
(2) |
where xi is the system input variables, Ai is the fuzzy set, and Y is the system output. The output value of the fuzzy model, consisting of the m rules, is calculated as a weighted average of outputs for each rule as Eq. (3.1) and Eq. (3.2). In fact, Y and Yi are two different variables.
 |
(3.1) |
 |
(3.2) |
where hi is the vector of deposits of the rule left sequences (i-order) for the current system input, i.e., x = (x1, ..., xk). As a function y = f (x1, x2 … , xk); it is usually used as the polynomial function. In the case of polynomial of i-order, we can detail the fuzzy model. The Takagi-Sugeno fuzzy model can be represented by the totality of production of the rules. If Zx (t) is described by the fuzzy set
 then we have Eq. (4).
then we have Eq. (4).
 |
(4) |
where, r is the number of fuzzy rules, x(t)
 Rn is the phase vector and u(t)
Rn is the input vector, y(t)
Rq is the output vector, Ai, Bi and Ci are as below.
Rn is the phase vector and u(t)
Rn is the input vector, y(t)
Rq is the output vector, Ai, Bi and Ci are as below.
 |
 is the vector of sending variable which can be as the functions of phase variables, external disturbances or the time. The structure of fuzzy observer for the uninterruptible fuzzy system is assigned by use of the rules as follows (Eq. (5)).
is the vector of sending variable which can be as the functions of phase variables, external disturbances or the time. The structure of fuzzy observer for the uninterruptible fuzzy system is assigned by use of the rules as follows (Eq. (5)).
 |
(5) |
Let us assume that the vector is not dependent on the variables' condition, which is defined by the fuzzy observer. In this case - in the presence of the fuzzy observer - the regulator has a form as Eq. (6.1) where its components are as Eq. (6.2).
 |
(6.1) |
 |
(6.2) |
The corresponding control rules will be as Eq. (7), and the fuzzy observer for the uninterruptible fuzzy system is according to Eq. (8).
 |
(7) |
 |
(8) |
where Fi and Ki are determined by the use of a linear matrix inequalities. In this work, for development of the rule, we propose the use of the Takagi-Sugeno deterministic rules in the first order, as Eq. (9). For example, the condition {x1 is Ai} is realized by a fuzzification function as Eq. (10).
 |
(9) |
 |
(10) |
For the number k and selection of the fuzzy input sets of A1, A2, …, Ak, i.e., input values and their parameters, a fuzzy clustering method is used according to the c-averages [6J.C. Bezdec, Pattern Recognition with Fuzzy Objective Function Algorithms., Plenum Press: New York, .
[http://dx.doi.org/10.1007/978-1-4757-0450-1] ]. For fuzzy variable inputs, the triangular membership functions are selected. In the capacity of the membership function centers, the centers of clusters are selected. Thus the rule consists of the value combinations of fuzzy input sets in all such kinds. The number of membership functions is then equal to the rule number. For the correct development of the rule, it is necessary to select the coefficients a1i, a2i, and … and bi; (for the set of m rules) according to the extent of the Eq. (1) for having a minimal error.
3. PROCESS BASED ON NEURAL NETWORK
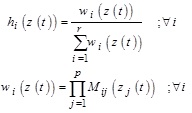
According to the m rules, the aggregative output result of the neural network has the following form (Eq. (11)).
 |
(11) |
where the weighting coefficient (wi) is interpreted as a component relevancy µA(xi). In this case, we can associate Eq. (11) along with the five-layer fuzzy neural network as shown in (Fig. 1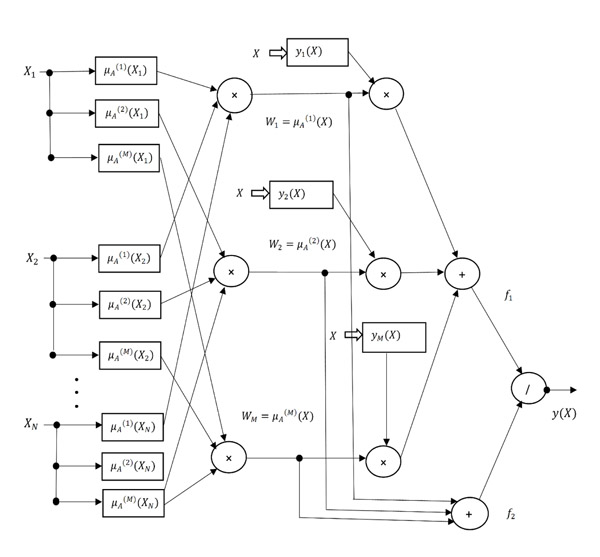 ) and described in Algorithm1.
) and described in Algorithm1.
In order to do the training and for definition of the parameters, just the first (non-linear) and third (linear) layers must be occurred.
 |
Fig. (1) The FNN used in our work. |
4. APPLICATION OF GENETIC ALGORITHM (GA)
The functionality of the Genetic Algorithm (GA) is based on the genetic processes of biological entities in which the biological populations are created during several generations and are following the law of the natural selection according to the rule «the strongest survives». By imitating this process, the genetic algorithms will be able to apply for real-world problems subject to this fact they are encoded in an appropriate manner [7G. Kuchuk, V. Kharchenko, A. Kovalenko, and E. Ruchkov, "Approaches to Selection of Combinatorial Algorithm for Optimization in Network Traffic Control of Safety-Critical Systems", in Proceedings: IEEE East-West Design & Test Symposium (EWDTS’16), pp. 384-389.
[http://dx.doi.org/10.1109/EWDTS.2016.7807655] -8D. Goldberg, Genetic Algorithms in Search, Optimization and Machine Learning., Addison-Wesley Publisher, .]. Based on these specific features, the genetic algorithm as an artificial intelligence search algorithm for optimization problems has many advantages such as the possibility of parallel searching in several directions with considering the information obtained from the previously examined searches.
In this work, the initial population is formed in a random form, moreover, each potential solution, i.e., the set a11,a21, …, ak1, b1; a12, a22, …, ak2, b2; … ; a1m, a2m, …, akm, bNm; was represented by an individual population (the encoding by the real numbers). For reproducing values, the «single-ton/cross-over» point with a probability of 0.9 is used; the mutation is performed with a probability of 0.01. «single-ton/cross-over» point shows some properties of fuzzy sets in its definition. For more details regarding «single-ton/cross-over» and related terms such as convex sets in fuzzy logic control refer to [9C. Bonivento, R. Rovatti, and C. Fantuzzi, Fuzzy Logic Control: Advances in Methodology., World Scientific, .]. The selection of parents is performed with the help of the «roulette wheel» and the elitism. In the fitness function, a value is selected according to the concept discussed in Eq. (1) for optimizing the computed error based on the previous metric or new criteria as Eq. (12).
 |
(12) |
The criterion for the end of the algorithm is the maximum number of generations or the change in the fitness function over 50 generations will be less than 0.001. The number of generations required to achieve a given performance under these conditions did not exceed a threshold which is related to the total number of fuzzy sets for all variables.
5. SIMULATIONS
In this section, we wish to evaluate the proposed model. Towards this modeling, we use the Fuzzy Neural Network (FNN) in the third section with an optimizer based on Genetic Algorithm (GA) discussed in the past section. The simulation results of our new model will clearly prove that the proposed model and its formulation are according to a theoretically model for a consumed problem. In details, we suppose two arbitrary surface plots as the ideal solutions of the problem, and then, we resolve the problem for plots based on our model. For the confirmation of the provided model, simulations are done for two three-dimensional surfaces, as below (Eq. (13) and Eq. (14)).
 |
(13) |
 |
(14) |
where one of them is discontinuous at the points (0,0) and (1,1), as Fig. (2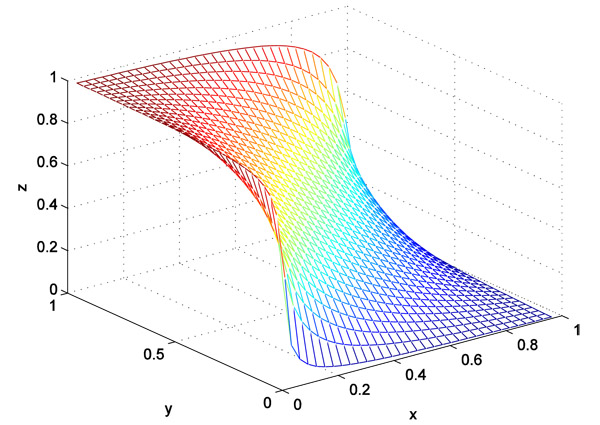 ), and the second is flush multimodal function over the whole area of definition, as Fig. (3
), and the second is flush multimodal function over the whole area of definition, as Fig. (3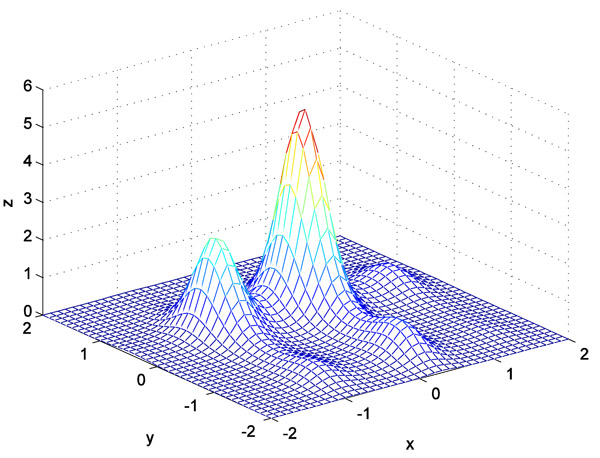 ). The simulation results of the proposed model are shown in Figs. (4
). The simulation results of the proposed model are shown in Figs. (4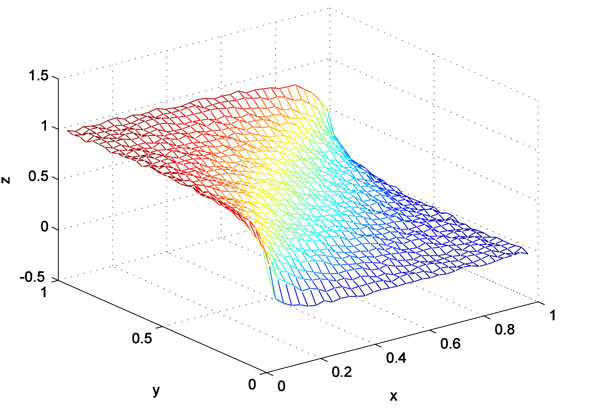 and 5
and 5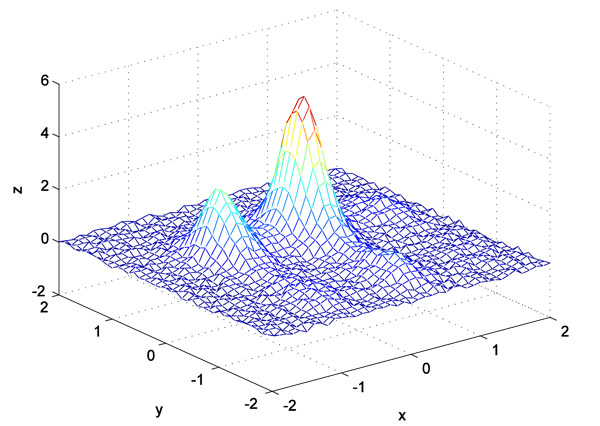 ), illustratingrelatively similar results for both simulation-based and theoretical solutions in both considered plots. The simulation is performed in two ways under the neural network and using the genetic algorithm. For fuzzy model development, the datasets, which consist of 440 and 1689 points, respectively, are selected as uniform distribution on the intervals [0,1] and [–2,2] for functions of and, respectively.
), illustratingrelatively similar results for both simulation-based and theoretical solutions in both considered plots. The simulation is performed in two ways under the neural network and using the genetic algorithm. For fuzzy model development, the datasets, which consist of 440 and 1689 points, respectively, are selected as uniform distribution on the intervals [0,1] and [–2,2] for functions of and, respectively.
For the function F(x, y), three fuzzy sets for each variable x or y (namely, the fuzzy model is for nine rules), are obtained from the model. And for the function G(x, y), five fuzzy sets for the variable x and 4 fuzzy sets for y (namely, the fuzzy model is for 20 rules). The simulation-based results during the run time confirm the proposed approach. With such initial data, L = 200 experiments were carried out, the generalized results of which are given in Table (1). The best results on the execution time with a relatively identical accuracy of the solution showed that the second method using the genetic algorithm is better. In addition, both approaches based on the proposed method have better running time than other schemes in terms of simulation in a similar hardware.
 |
Fig. (2) The first surface plot (F (x, y)). |
 |
Fig. (3) The second surface plot (G (x, y)). |
 |
Fig. (4) Simulation results of the proposed model for function F(x, y). |
 |
Fig. (5) Simulation results of the proposed model for function G(x, y). |
CONCLUSION
In this work, the method for auto-generation of Takagi-Sugeno fuzzy rules was represented according to the numerically experimental data and based on the use of fuzzy clustering for the definition of the parameters of membership function. The most acceptable results were obtained with using the proposed fuzzy model along with the use of the genetic algorithm. The proposed approach is a convenient and effective tool for some aspects of traffic control in the communication networks and complex systems. When changing the network architecture of safety-critical I&C systems, the problem is converted to an operational redistribution of routes (also see [2G. Kuchuk, A. Kovalenko, V. Kharchenko, and A. Shamraev, Resource-oriented approaches to implementation of traffic control technologies in safety-critical I&C systems.Book: Green IT Engineering: Components, Network, and Systems Implementation., Springer International Publishing, pp. 313-337.
[http://dx.doi.org/10.1007/978-3-319-55595-9_15] ]). The proposed approach made it possible to meet the requirements for the speediness of redistribution, one-order reduction of the time of recalculation of traffic directions. Further researches can be concentrated on model development in the case with incomplete rule and for a specific application like wireless sensor networks [10M.R. Khosravi, H. Basri, and H. Rostami, "Efficient routing for dense UWSNs with high-speed mobile nodes using spherical divisions", J. Supercomput., .
[http://dx.doi.org/10.1007/s11227-017-2148-x] ] or underwater networks [11M. Sharif-Yazd, M.R. Khosravi, and M.K. Moghimi, "A survey on underwater acoustic sensor networks: Perspectives on protocol design for signaling, MAC and routing", Journal of Computer and Communications, vol. 5, no. 5, pp. 12-23.
[http://dx.doi.org/10.4236/jcc.2017.55002] ]. Also, other fuzzy neural networks [12A. Torabi, M.J. Er, X. Li, and B.S. Lim, "Sequential fuzzy clustering based dynamic fuzzy neural network for fault diagnosis and prognosis", Neurocomputing, vol. 196, pp. 31-41.
[http://dx.doi.org/10.1016/j.neucom.2016.02.036] ] can be replaced with the case used in our study.
CONSENT FOR PUBLICATION
Not applicable.
CONFLICT OF INTEREST
The authors declare no conflict of interest, financial or otherwise.
ACKNOWLEDGEMENTS
Decleard none.
REFERENCES
| [1] | U. Sandler, and L. Tsitolovsky, Neural Cell Behavior and Fuzzy Logic., Springer International Publishing, . ISBN: 978-0-387-09542-4 |
| [2] | G. Kuchuk, A. Kovalenko, V. Kharchenko, and A. Shamraev, Resource-oriented approaches to implementation of traffic control technologies in safety-critical I&C systems.Book: Green IT Engineering: Components, Network, and Systems Implementation., Springer International Publishing, pp. 313-337. [http://dx.doi.org/10.1007/978-3-319-55595-9_15] |
| [3] | S. Guillaum, "Designing Fuzzy Inference systems from Data: An Interpretability-Oriented Review", IEEE Trans. Fuzzy Syst., vol. 9, no. 2, pp. 426-443. [http://dx.doi.org/10.1109/91.928739] |
| [4] | H. Takagi, and M. Sugeno, "Fuzzy identification of systems and its application to modeling and control", IEEE Trans. Syst. Man Cybern., vol. 15, no. 1, pp. 116-132. [http://dx.doi.org/10.1109/TSMC.1985.6313399] |
| [5] | N. Nomura, I. Hayashi, and N. Wakami, A Self Tuning Method of Fuzzy Control by Descent Method, Book: Fuzzy Logic Theory and Decision Library, Springer International Publishing, pp. 155-158. |
| [6] | J.C. Bezdec, Pattern Recognition with Fuzzy Objective Function Algorithms., Plenum Press: New York, . [http://dx.doi.org/10.1007/978-1-4757-0450-1] |
| [7] | G. Kuchuk, V. Kharchenko, A. Kovalenko, and E. Ruchkov, "Approaches to Selection of Combinatorial Algorithm for Optimization in Network Traffic Control of Safety-Critical Systems", in Proceedings: IEEE East-West Design & Test Symposium (EWDTS’16), pp. 384-389. [http://dx.doi.org/10.1109/EWDTS.2016.7807655] |
| [8] | D. Goldberg, Genetic Algorithms in Search, Optimization and Machine Learning., Addison-Wesley Publisher, . |
| [9] | C. Bonivento, R. Rovatti, and C. Fantuzzi, Fuzzy Logic Control: Advances in Methodology., World Scientific, . |
| [10] | M.R. Khosravi, H. Basri, and H. Rostami, "Efficient routing for dense UWSNs with high-speed mobile nodes using spherical divisions", J. Supercomput., . [http://dx.doi.org/10.1007/s11227-017-2148-x] |
| [11] | M. Sharif-Yazd, M.R. Khosravi, and M.K. Moghimi, "A survey on underwater acoustic sensor networks: Perspectives on protocol design for signaling, MAC and routing", Journal of Computer and Communications, vol. 5, no. 5, pp. 12-23. [http://dx.doi.org/10.4236/jcc.2017.55002] |
| [12] | A. Torabi, M.J. Er, X. Li, and B.S. Lim, "Sequential fuzzy clustering based dynamic fuzzy neural network for fault diagnosis and prognosis", Neurocomputing, vol. 196, pp. 31-41. [http://dx.doi.org/10.1016/j.neucom.2016.02.036] |